Perception
Segmentation, grounding, and reasoning in 3D scenes.
I am a research scientist at NVIDIA Research Taiwan. My research has focused on computer vision for 3D scenes. More recently, I have been building a foundation model for embodied agents.
📌 Internship / University Collaboration. I am always looking for strong graduate students to collaborate with. If you are interested in collaborating with me, please email me.
My research starts from 3D scene understanding including perception, reconstruction and rendering. Nowadays, I am working on 3D scene interaction where embodied agents do reasoning and exploration.
Segmentation, grounding, and reasoning in 3D scenes.
Pointcloud, voxel, and Gaussian for representing 3D scenes
Action and exploration in real-world or 3D simulators.
Representative publications are shown first, followed by earlier work in 3D vision.
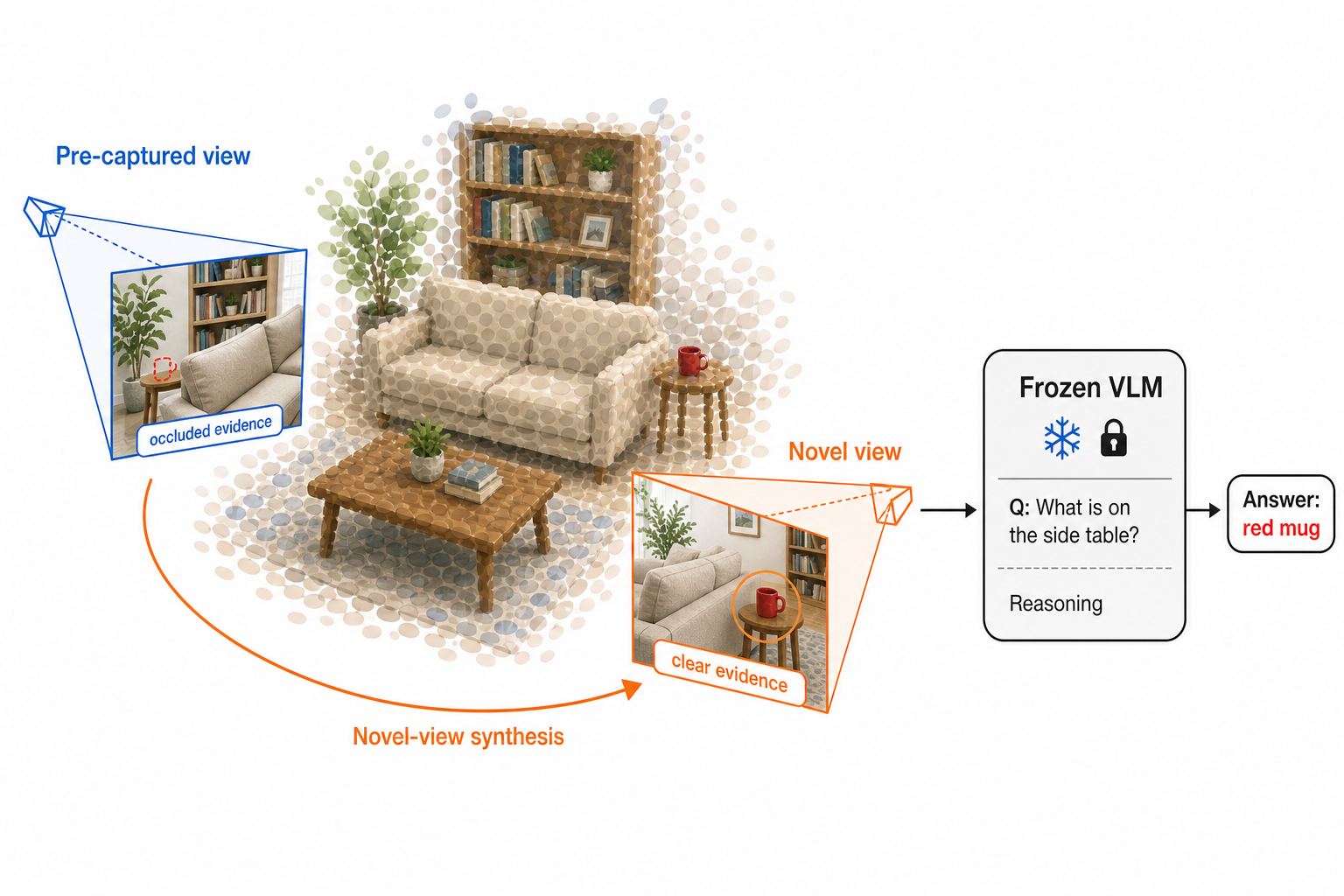
Novel-view synthesis improves the reasoning capabilities of VLMs in 3D scenes.
Any VLMs or LLMs can now reason over 3D scenes.
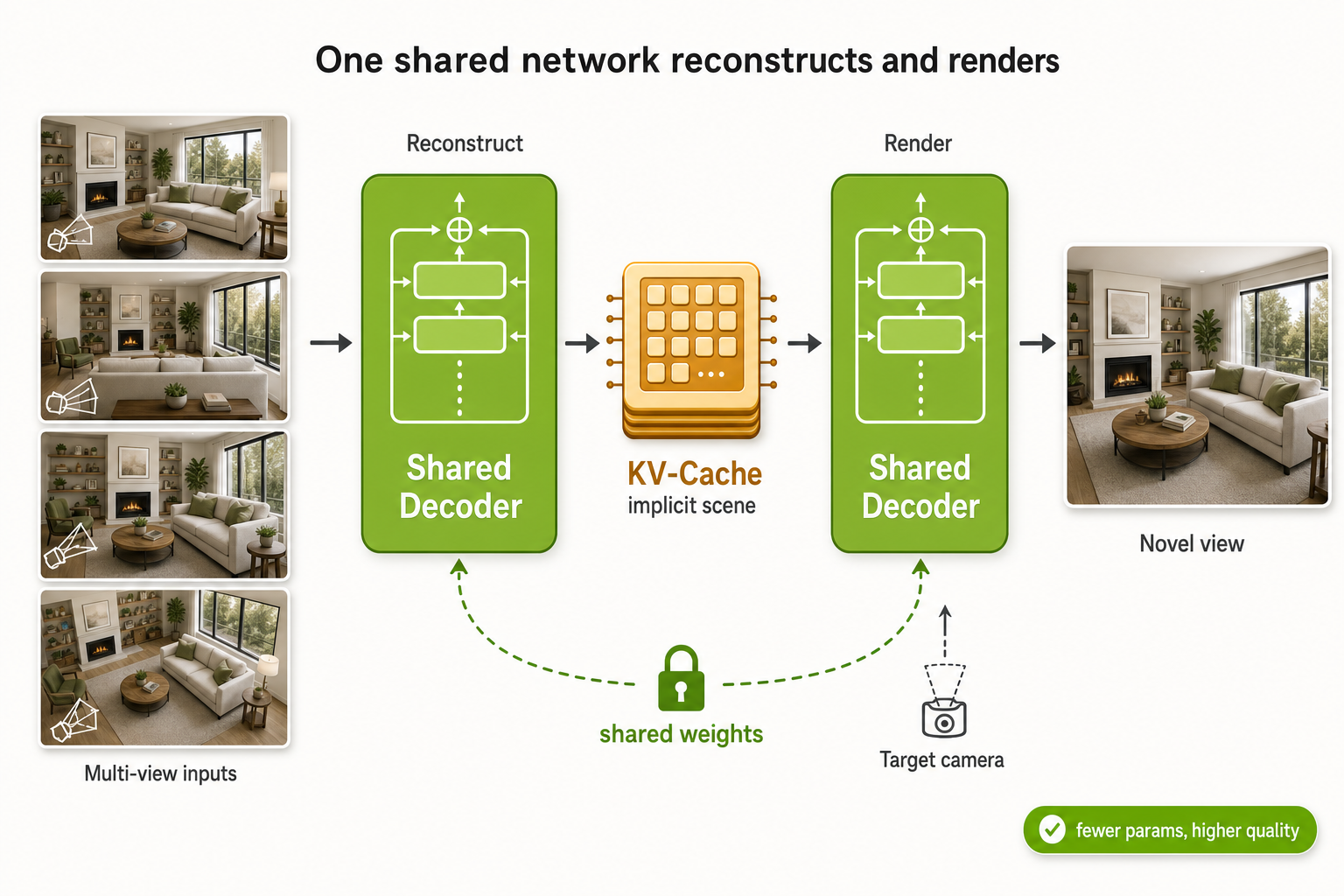
3D scene is encoded as KV-cache by our decoder-only model.
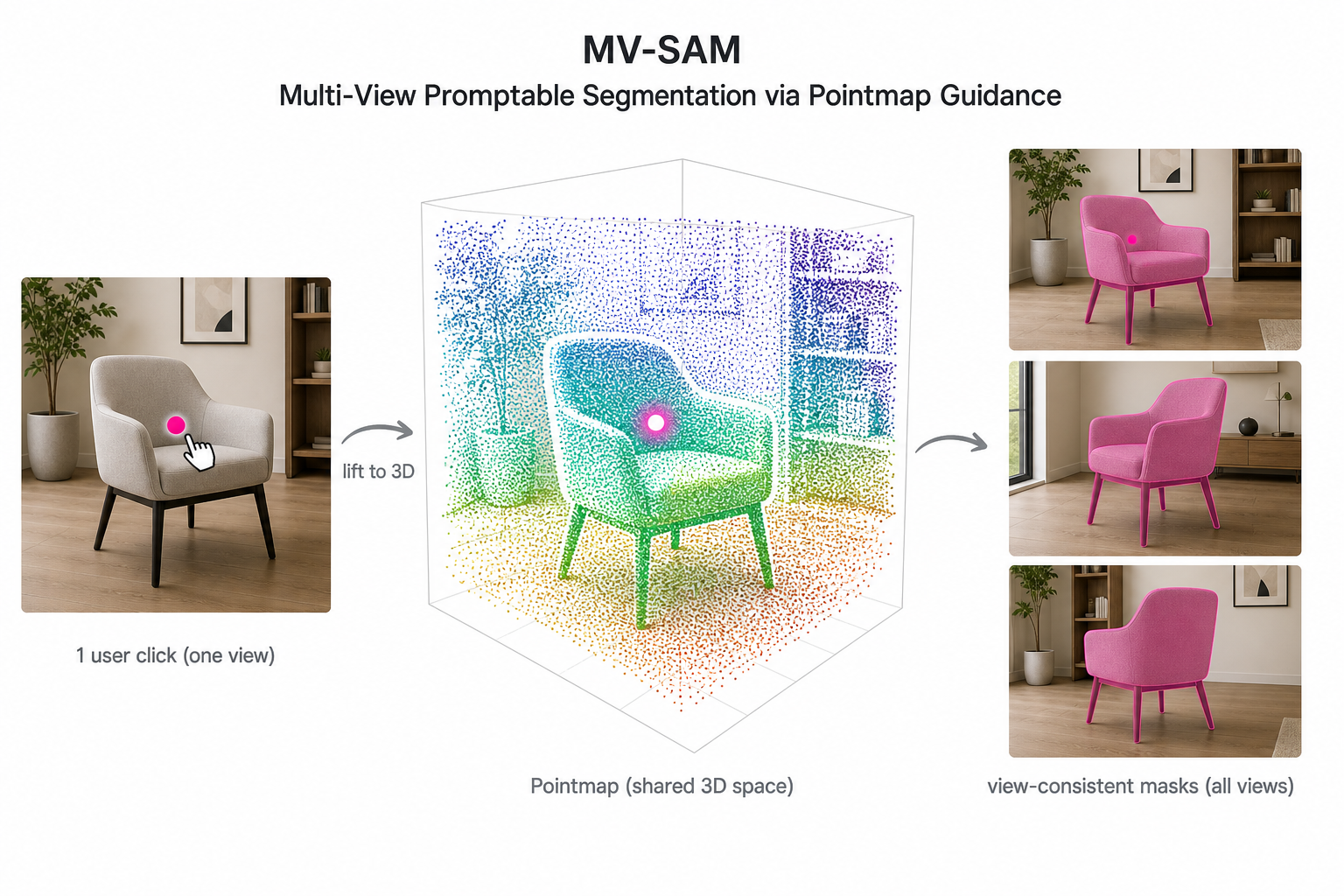
View-consistent segmentation using pointmaps
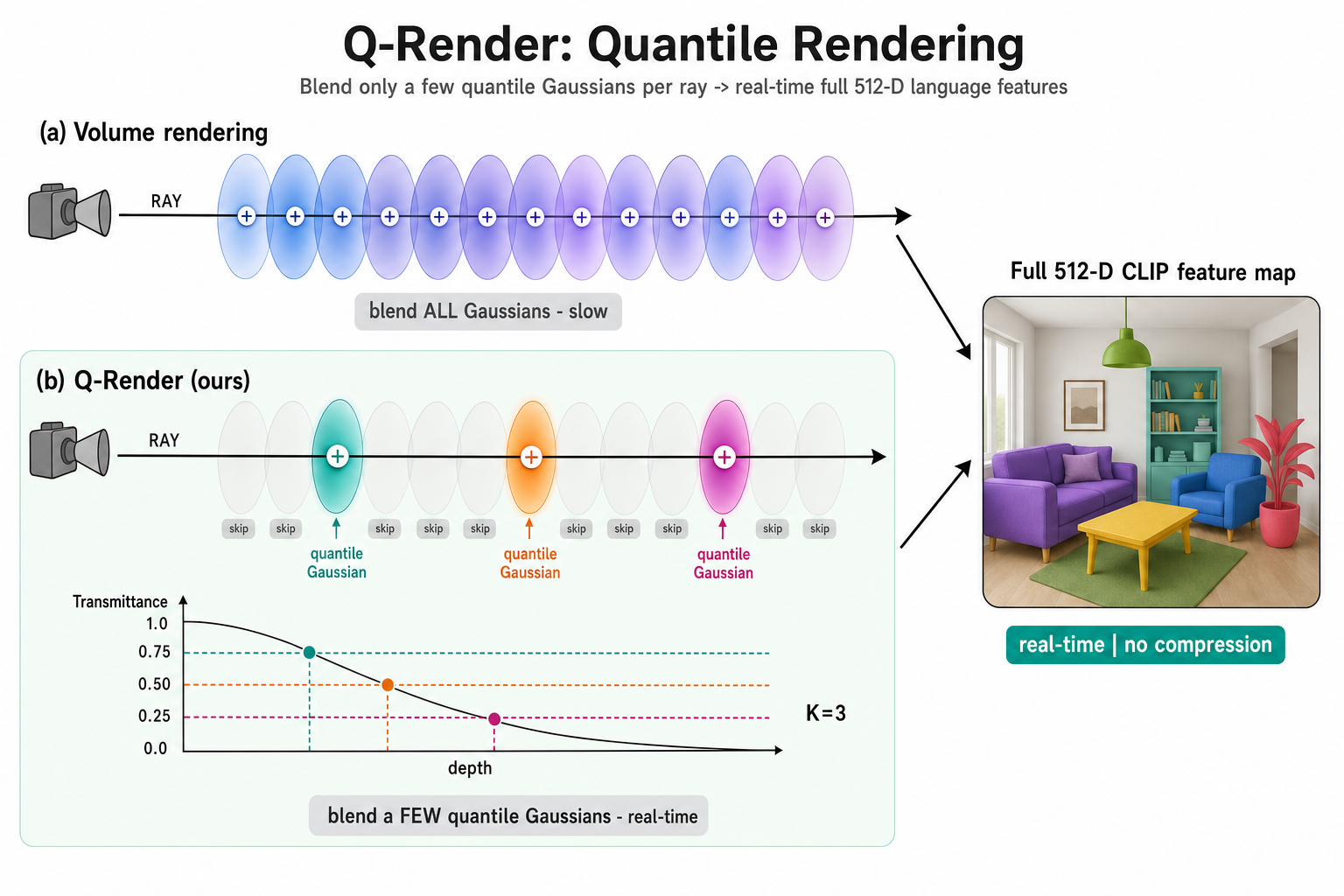
Efficient color/feature rendering algorithm from 3D Gaussians.
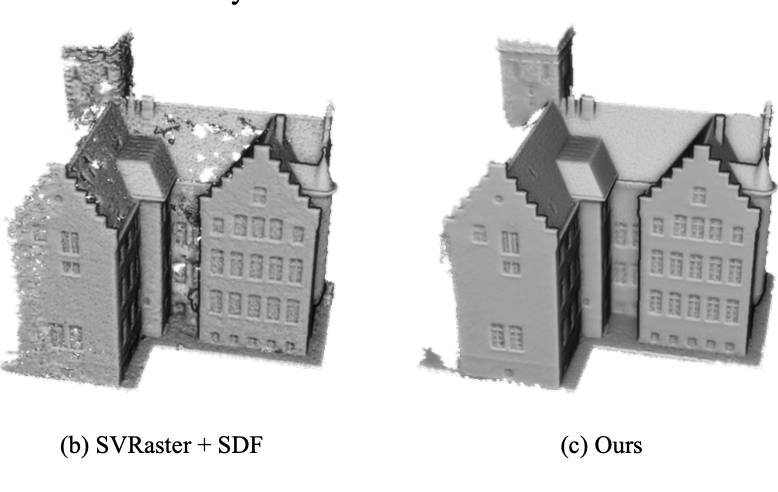
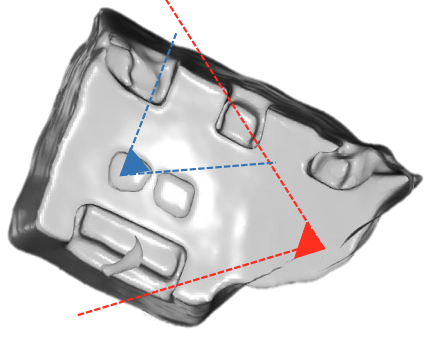
Voxel-wise associations among parent-child and sibling voxel groups produce smoother surface reconstruction.
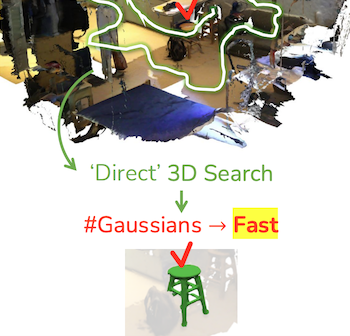
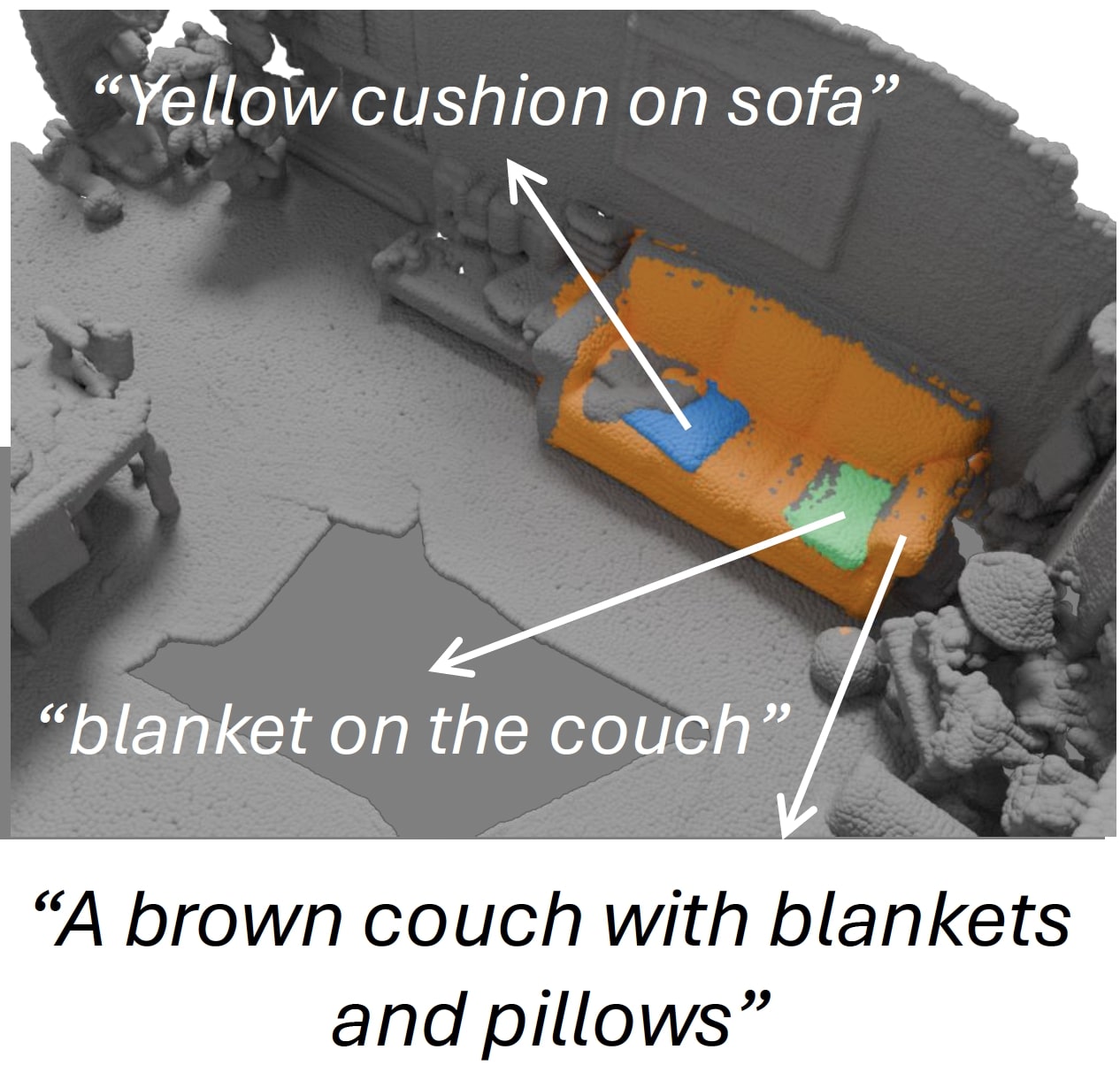
Language knowledge is distilled into 3D Gaussian Splatting for direct referring.
Data generation pipline from 2D images to 3D mask-text.
Rasterization is extended into sparse voxel representations for real-time image rendering.
Spacetime surface regularization for 4D surface reconstruction and dynamic scene rendering.
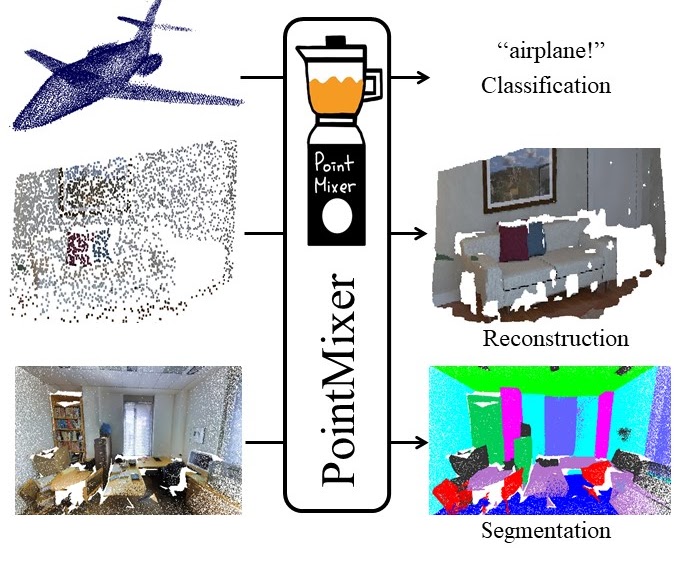
A new MLP-only architecture for 3D point cloud understanding.
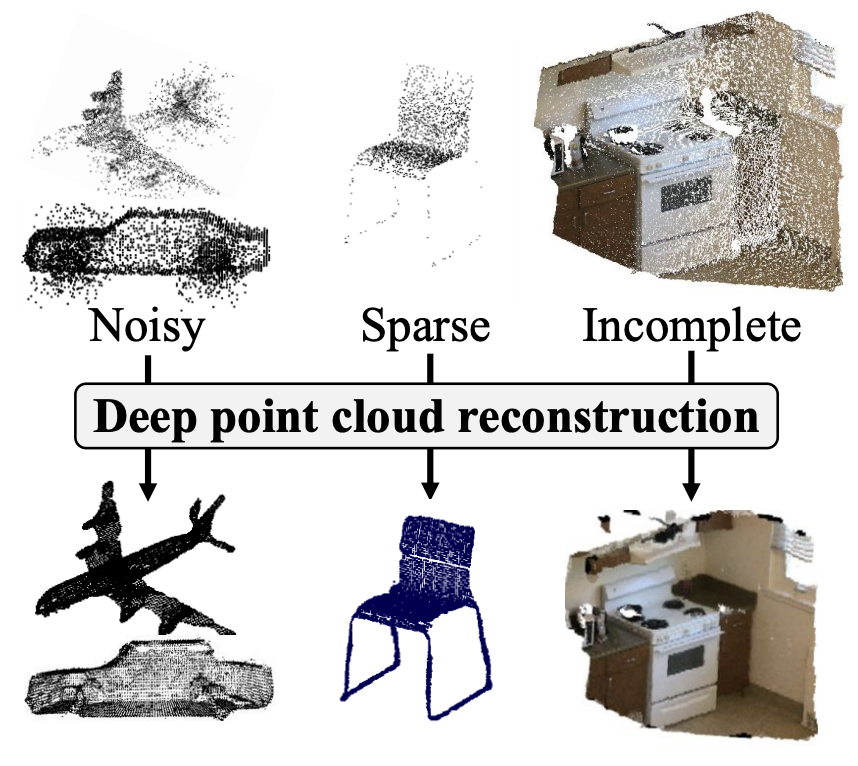
Point cloud upsampling and denoising are performed jointly with strong generalization.
A deep learning based depth fusion algorithm for indoor scene reconstruction.
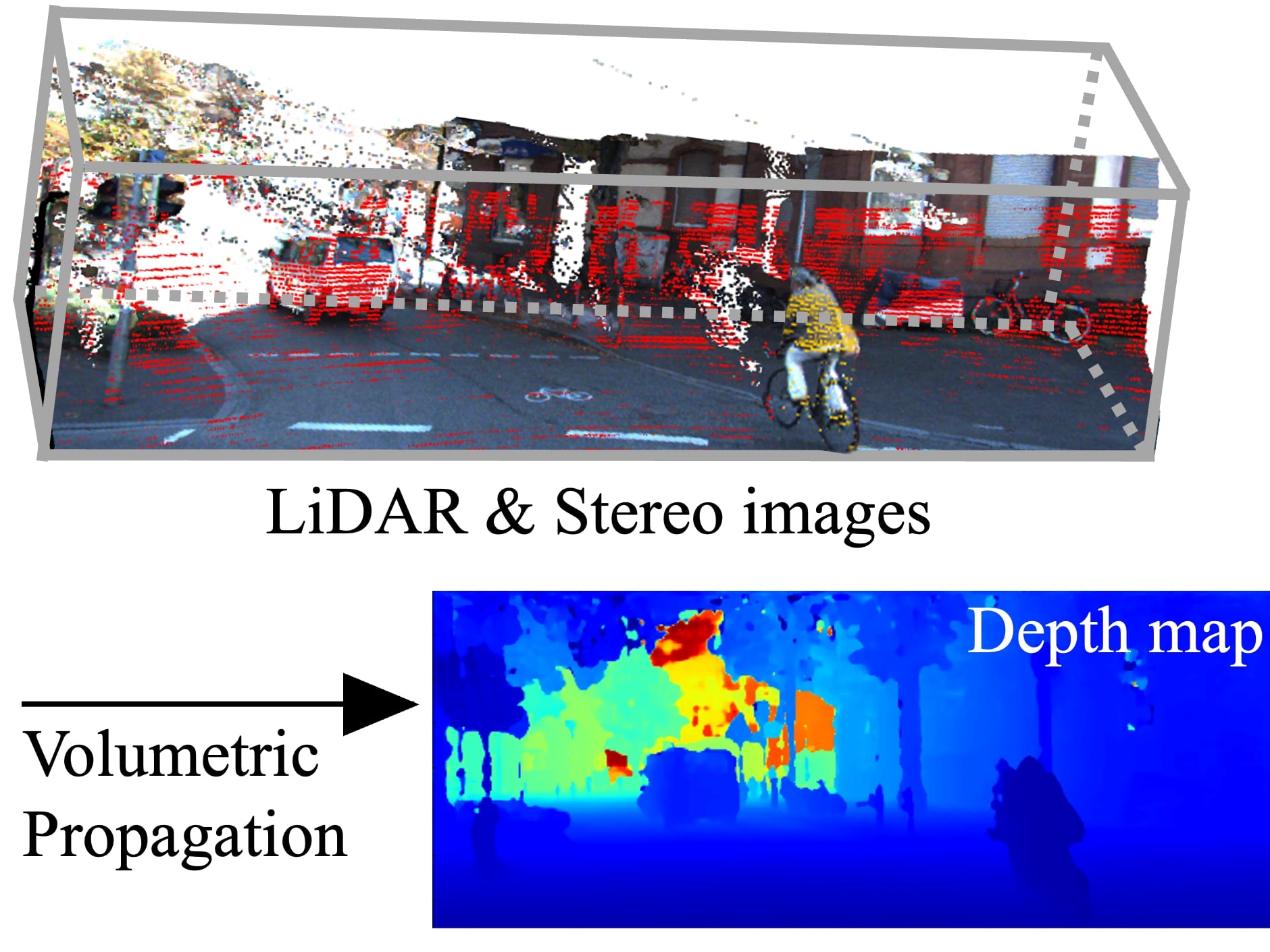
Dense depth estimation by fusing LiDAR points and stereo images.
Stereo matching is guided by object-level 3D context inside the cost volume.
Monocular 3D vehicle localization is decomposed into road-plane segment prediction and 3D regression.
Usually, I have a chance to hire one intern at each year. Feel free to send me an email if you are interested in this position.
University collaborations are always welcome. I am happy to join academic collaborations when a student’s research goals matches with my interests. Authorship order is not my main concern; I value the opportunity to contribute to meaningful and high-quality projects.